Második mérföldkő
- 1. IMPLEMENTÁCIÓ OPENCV-BEN
- 2. MEGOLDÁS MATLAB-BAN, CNN SEGÍTSÉGÉVEL
- 2.1. LÉPCSŐK DETEKTÁLÁSA
- 3. SZAKIRODALOM
-
SSIP 2016 TEAM-C dokumentáció
https://ssip2016teamcblog.wordpress.com/ -
E. Jauregi, E. Lazkano and B. Sierra - Approaches to door identification for robot navigation
http://cdn.intechopen.com/pdfs/10237/InTechApproaches_to_door_identification_for_robot_navigation.pdf -
F.Mahmood, F.Kuwar - A Self-Organizing Neural Scheme for Door Detection in Different Environments
https://arxiv.org/pdf/1301.0432.pdf -
S. Cloix, G. Bologna, V. Weiss, T. Pun, D. Hasler - Descending Stairs Detection with Low-Power Sensors
https://pdfs.semanticscholar.org/2d70/ab62aa5378efe9354d8e6091cdb641ee9830.pdf -
Jens Hensler, Michael Blaich, and Oliver Bittel - Real-time Door Detection based on AdaBoost learning algorithm
https://pdfs.semanticscholar.org/8369/06b2ca9109760d370ee567ba4cd8b7ce9f33.pdf -
R. Sekkal, F. Pasteau, M. Babel, B. Brun, I. Leplumey - SIMPLE MONOCULAR DOOR DETECTION AND TRACKING
http://www.irisa.fr/lagadic/pdf/2013_icip_sekkal.pdf -
Xiaodong Yang and Yingli Tian - Robust Door Detection in Unfamiliar Environments by Combining Edge and Corner Features
http://www-ee.ccny.cuny.edu/wwwn/yltian/Publications/CVAVI2010_Yang.pdf -
Hannes Harms, Eike Rehder, Tobias Schwarze, Martin Lauer - Detection of Ascending Stairs using Stereo Vision
http://www.mrt.kit.edu/z/publ/download/harms/StairDetection/2015_Harms_StairDetection.pdf -
Rai Munoz, Xuejian Rong, Yingli Tian - DEPTH-AWARE INDOOR STAIRCASE DETECTION AND RECOGNITION FOR THE VISUALLY IMPAIRED
http://www-ee.ccny.cuny.edu/wwwn/yltian/Publications/ICME16-W155.pdf -
Mukul Anand Pathak, Kshitij Kamlakar, Shwetant Mohapatra, Prof. Uma Nagaraj - DEVELOPMENT OF CONTROL SOFTWARE FOR STAIR
DETECTION IN A MOBILE ROBOT USING ARTIFICIAL INTELLIGENCE AND IMAGE PROCESSING
http://www.iaeme.com/MasterAdmin/uploadfolder/IJCET_07_03_008/IJCET_07_03_008.pdf -
Deep Learning for Computer Vision with MATLAB Manual
https://www.mathworks.com/company/newsletters/articles/deep-learning-for-computer-vision-with-matlab.html -
Object Detection Using Deep Learning – MATLAB manual
https://www.mathworks.com/help/vision/examples/object-detection-using-deep-learning.html -
MatConvNet: Convolutional Neural Networks for MATLAB by Andrea Vedaldi and Karel Lenc
https://arxiv.org/pdf/1412.4564.pdf -
Alex Krizhevsky - Learning Multiple Layers of Features from Tiny Images
https://www.cs.toronto.edu/~kriz/learning-features-2009-TR.pdf
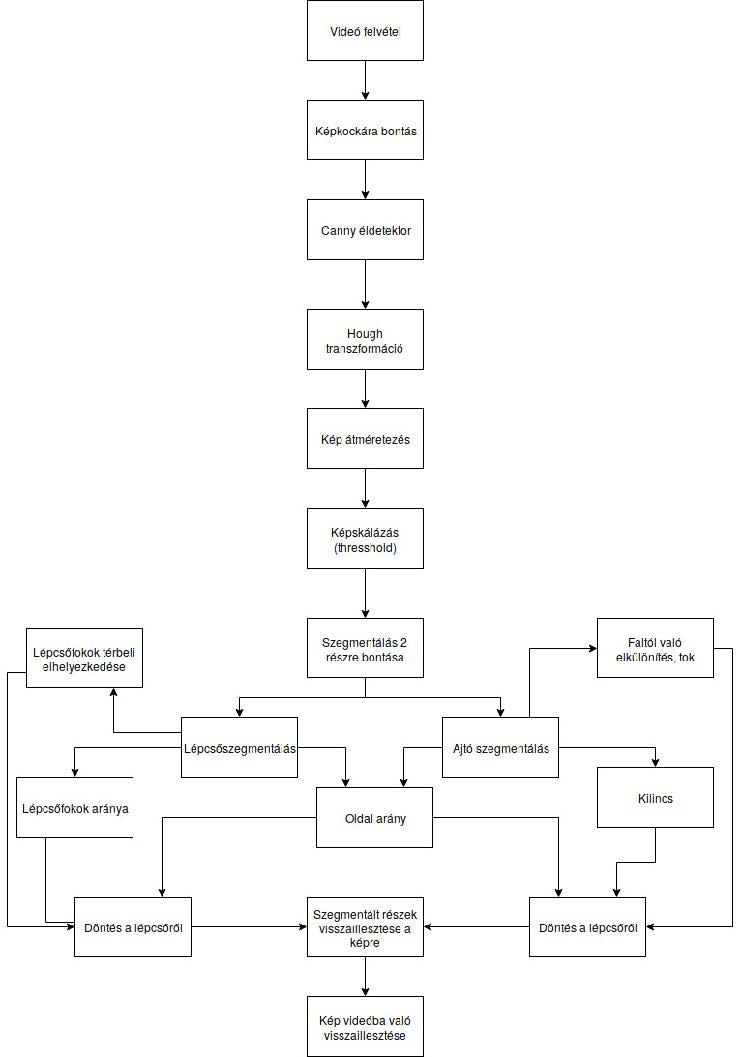
Az áttekintett szakirodalom alapján az egyik lehetséges választott módszer folyamatábrája a következő:
A hatékonyabb gépi tanulás elősegítésére az eredeti RGB képen elvégzünk bizonyos előfeldolgozó műveleteket, előkészítve ezzel a szegmentálásra. Ezek egyszerű képfeldolgozó műveletek, szűrők. Fontos, hogy a képen található fölösleges információkat eldobjuk, ezzel is hatékonyabbá téve az algoritmusunkat.
A színes képet minden esetben szürkeárnyalatossá alakítjuk, mivel a képpontok színe nem hordoz számunkra lényegi információt. A szürkeárnyalatos képen alkalmaznunk kell továbbá hisztogram-széthúzást is. Az egy ponton átmenő egyeneseket legegyszerűbben a Hough térben a trigonometrikus görbék metszéspontjából nyerhetjük ki, ami tulajdonképpen nem is egy pont, hanem egy adott sugarú kör.
Az általunk végzett előfeldolgozás algoritmusa:
I = rgb2gray(imread('door.6.jpg'));
rotI = imrotate(I,0,'crop');
% binráis kép előállítása
BW = edge(rotI,'prewitt');
st1 = strel('diamond',5);
st2 = strel('diamond',3);
BW = imdilate(BW, st1);
BW = imerode(BW, st2);
figure;
imshow(BW);
figure;
%%
% Hough-transzformáció elvégzése a bináris képen
[H,T,R] = hough(BW);
imshow(H,[],'XData',T,'YData',R,...
'InitialMagnification','fit');
xlabel('\theta'), ylabel('\rho');
axis on, axis normal, hold on;
%%
% sarokpontok detektálása a kép Hough-transzformáltján
P = houghpeaks(H,4,'threshold',ceil(0.3*max(H(:))));
x = T(P(:,2)); y = R(P(:,1));
plot(x,y,'s','color','white');
%%
% Élek detektálása és kirajzolása
lines = houghlines(BW,T,R,P,'FillGap',1000,'MinLength',1100);
figure, imshow(rotI), hold on
max_len = 0;
for k = 1:length(lines)
xy = [lines(k).point1; lines(k).point2];
plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');
plot(xy(1,1),xy(1,2),'x','LineWidth',2,'Color','yellow');
plot(xy(2,1),xy(2,2),'x','LineWidth',2,'Color','red');
len = norm(lines(k).point1 - lines(k).point2);
if ( len > max_len)
max_len = len;
xy_long = xy;
end
end
Az algoritmus végrehajtva tesztképeken az alábbi ábrán látható:

Az előfeldolgozott képet már átadhatjuk egy előre betanított neurális hálónak.
Megoldásunk egyik alapját az Object Detection Using Deep Learning MATLAB-os példa adta [13]. Ebben be van mutatva, hogyan lehet egy konvolúciós neurális hálót megtanítani stop tábla felismerésére, ezt próbáltuk úgy átalakítani, hogy ajtó és lépcső detektálására is alkalmas legyen.
A tanításhoz R-CNN-t (Regions with Convolutional Neural Network) használ, amivel meg tudja tanulni, hogy a kép egyes régióin milyen objektum van. Ehhez olyan képek szükségesek, melyeken előre bejelölték, hogy az adott régión milyen objektum szerepel.
A példa úgynevezett transfer learning módszert használ, amelynek lényege, hogy a neurális hálót egy sok képet tartalmazó adatbázison tanítják, majd ezt finomhangolják a kívánt objektum megtalálásához. Ezzel a módszerrel sokkal kevesebb tanítóképre van szükség, mintha nem lenne egy előre betanított hálónk. Az előre betanítás a CIFAR-10 képgyűjteménnyel történik [14]. Ezután saját képekkel tanítva lehet finomhangolni a hálót.
Esetünkben 20, ajtót tartalmazó képpel finomhangoltuk a hálót, mely képekhez megadtuk az ajtót befoglaló téglalapok pozícióját és méretét. A tesztelés során gyenge eredmények születtek, nem igazán sikerült megtalálnia a képen levő ajtókat. Ennek miértjére egyelőre még nem sikerült rájönnünk, de dolgozunk a probléma kiküszöbölésén.
A tanuló algoritmus alkalmazása az előfeldolgozott „door.jpg” képen:
clc
load('DoorsRcnn.mat','rcnn');
testImage = imread('door.jpg');
[bboxes, score, label] = detect(rcnn, testImage, 'MiniBatchSize', 32);
annotation = cell(size(label,1),1);
for i=1:size(label,1)
annotation{i} = sprintf('%s: (Confidence = %f)', label(i), score(i));
end
bbox = bboxes(:,:);
outputImage = insertObjectAnnotation(testImage, 'rectangle', bbox, annotation,
'LineWidth', 30,'FontSize', 72);
figure;
imshow(outputImage);
A neurális háló által elért eremények:

A lépcsők detektálásához nem szükséges teljes 3D rekonstrukciót készítenünk.
A legegyszerűbb módja a mélységi információ kinyerésének az optical flow alkalmazása, kihasználva, hogy több frameből álló videófelvételen kell detektálnunk a lépcsőket. Ennek lényege az egymást követő frameken történő pontmegfeleltetésen alapszik.